TRƯỜNG CƠ KHÍ - Đại học Bách khoa Hà Nội
Trường Cơ khí - Đại học Bách khoa Hà Nội

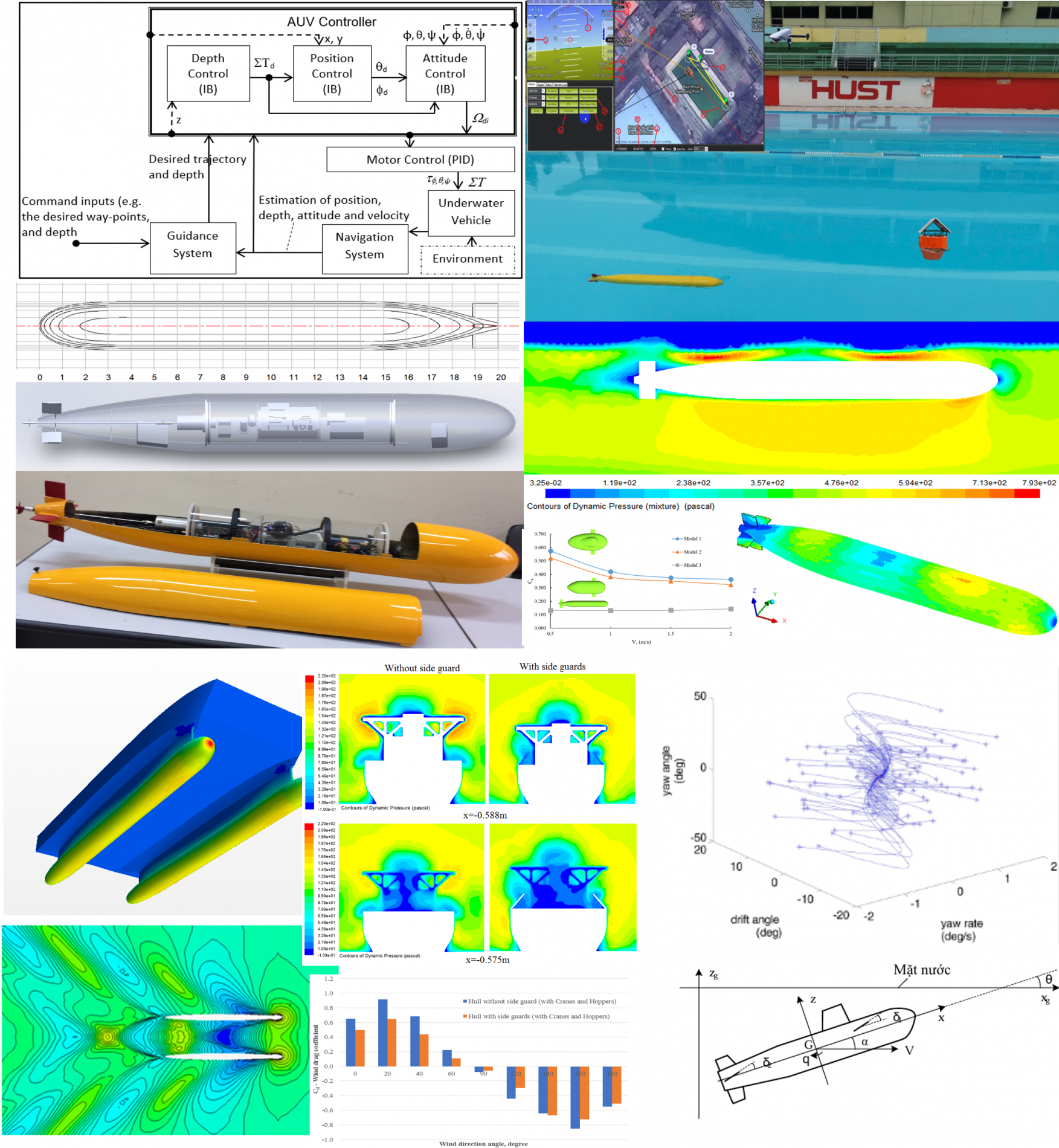
Lĩnh vực nghiên cứu
Điều khiển các phương tiện tự hành dưới nước (AUV/ASV).
Kiến trúc, phương pháp luận và ngôn ngữ mô hình hóa trong phát triển các hệ thống điều khiển nhúng và thời gian thực cho phương tiện tự hành.
Phân tích, thiết kế, mô phỏng số CFD và thực thi tối ưu công nghệ thiết kế thông qua mô hình thủy động lực học cho phương tiện dưới nước.
Nghiên cứu và phát triển các loại phương tiện thủy mới.
Giáo viên phụ trách: PGS. TS Ngô Văn Hệ, PGS. TS Lê Thanh Tùng, TS. Hoàng Công Liêm
Liên hệ: 804M-C7, he.ngovan@hust.edu.vn, Website: https://sme.hust.edu.vn/specialised-groups/ky-thuat-thuy-khi-va-tau-thuy
Tác giả: Nguyễn Hải Thanh
Những tin mới hơn
Những tin cũ hơn