English
English![[SME-NCKH] CÔNG BỐ TIÊU BIỂU THÁNG 4/2024](https://sme.hust.edu.vn/wp-content/uploads/2019/05/a.jpg)
Trajectory tracking of mobile robots using hedge-agebras-based controllers.
Doi: 10.1007/s11370-024-00529-2
Danh sách tác giả: Tien-Duy Nguyen, Sy-Tai Nguyen, Thi Thoa Mac* & Hai-Le Bui
Tác giả liên hệ: Thi Thoa Mac
Tên tạp chí: Intelligent Service Robotics; IF: 2.5, CiteScore: 5
Giới thiệu về nội dung nghiên cứu công bố:
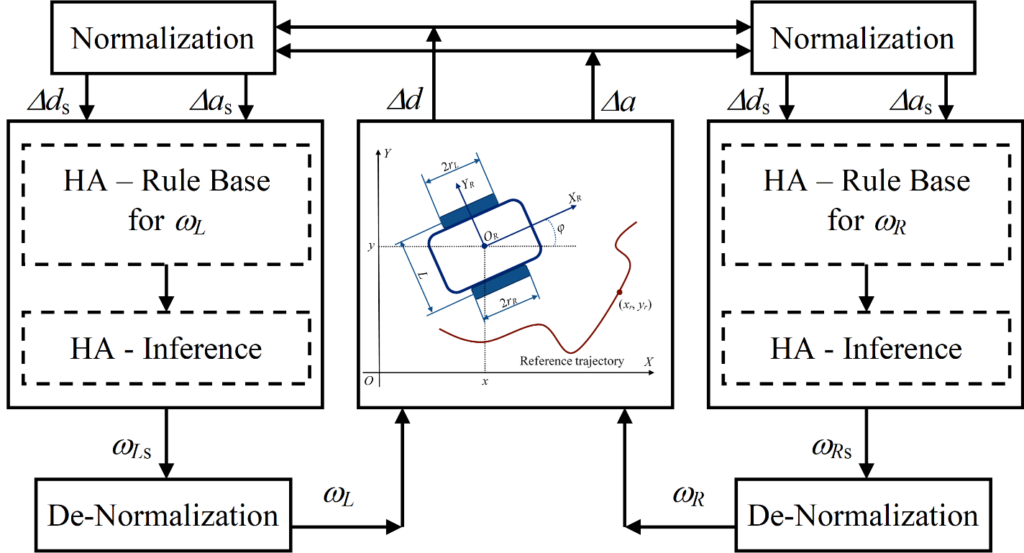
- Ứng dụng thành công lý thuyết Hedge-Algebras vào điều khiển chuyển động của mobile robots bám quỹ đạo.
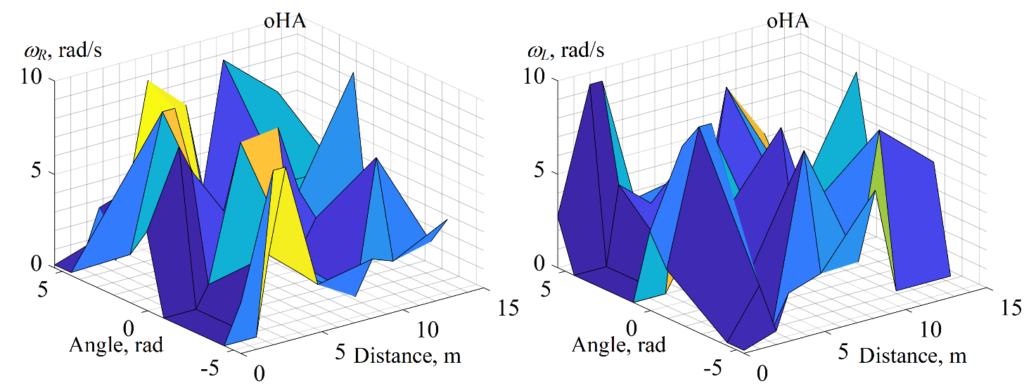
- Đề xuất phương pháp thiết lập hệ luật điều khiển định tính cho các bộ điều khiển dựa trên lý thuyết Hedge-Algebras để điều khiển chuyển động mobile robots bám các quỹ đạo tham chiếu.
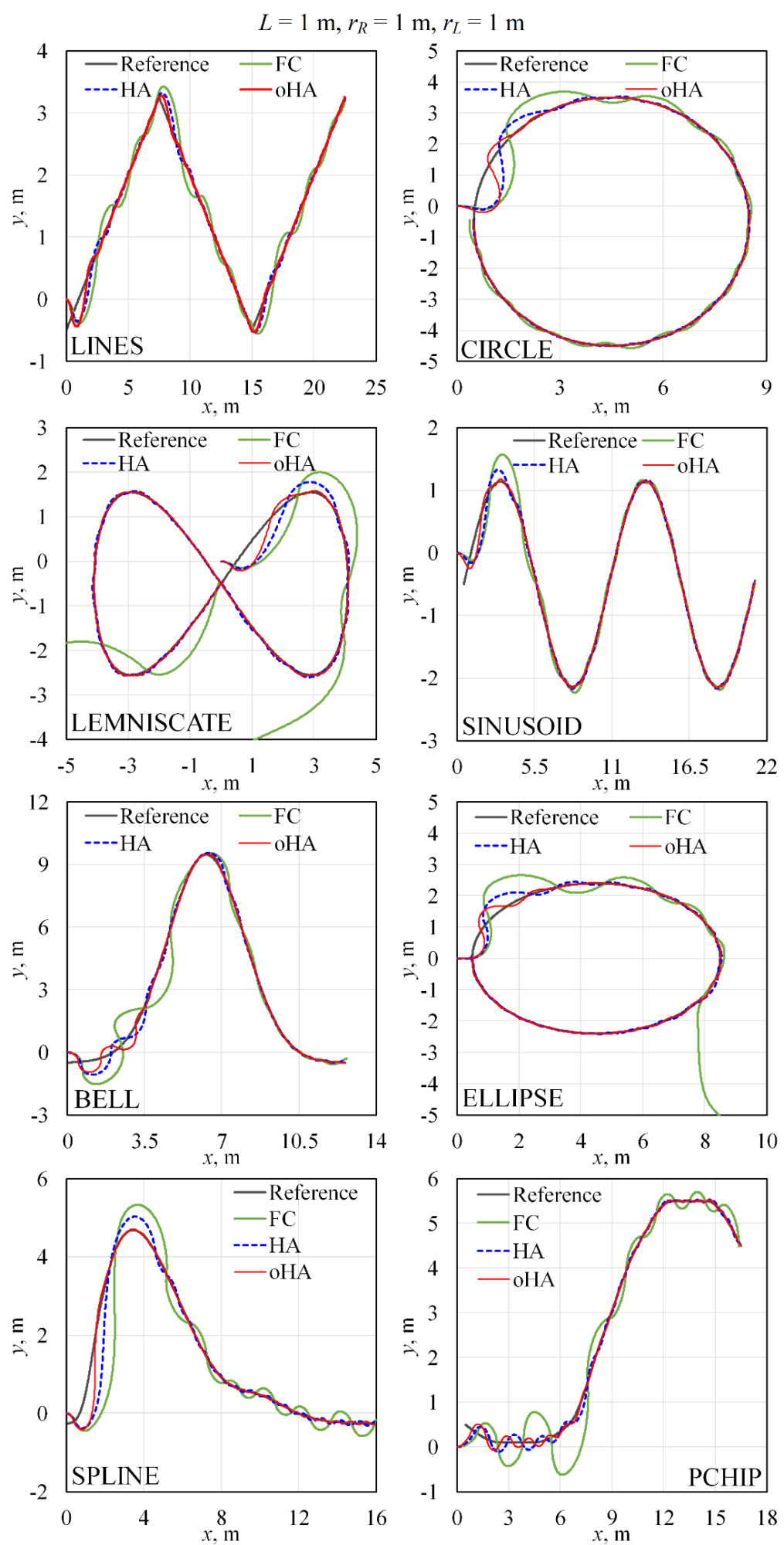
- Các bộ điều khiển được đề xuất, chỉ sử dụng 1 cơ sở luật điều khiển, hoạt động tốt với các quỹ đạo tham chiếu khác nhau và bền vững với sự thay đổi của các tham số của robot.
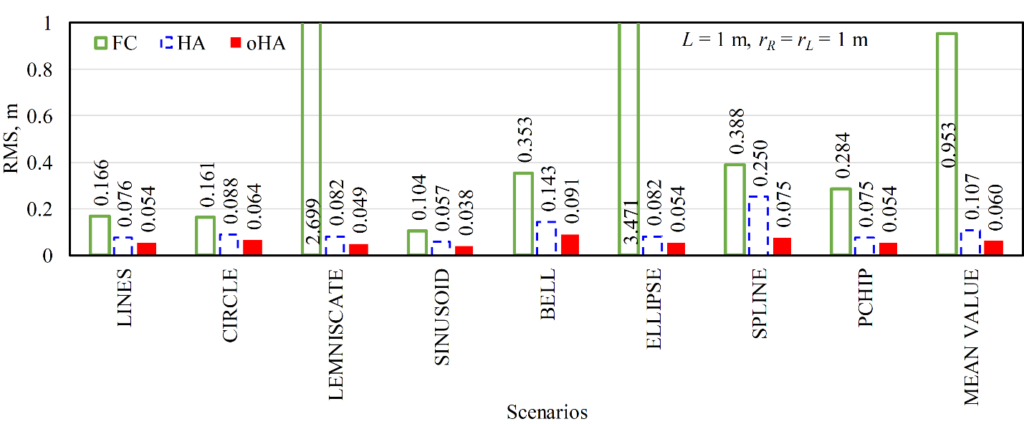
- Các bộ điều khiển được đề xuất có kết quả hiệu quả vượt trội so với bộ điều khiển dựa trên lý thuyết tập mờ về sai số vị trí giữa robot và quỹ đạo tham chiếu, thời gian tính toán hành động điều khiển, và khả năng bền vững đối với sự thay đổi của các tham số của robot.
Hình ảnh tiêu biểu: