
 English
English

PGS. TS. Nguyễn Thành Hùng
- Địa chỉ làm việc: Phòng 715M – Nhà C7, Đại học Bách Khoa Hà Nội, số 1- Đại Cồ Việt, Hà Nội
- Email: hung.nguyenthanh@hust.edu.vn
- Website: https://sites.google.com/view/thanhhungnguyen
- Điện thoại:
- Chức vụ: Phó trưởng Khoa, Giảng Viên cao cấp, Trưởng NCM Robot, Giám đốc chương trình đào tạo Cơ điện tử – Chương trình chuẩn
Giảng dạy/Teaching
- Nhập môn Cơ điện tử
- Kỹ thuật lập trình trong Cơ điện tử
- Đồ án thiết kế hệ thống Cơ khí
- Đồ án thiết kế hệ thống Cơ điện tử
- Hệ điều hành robot (ROS)
- Xử lý ảnh
- Trí tuệ nhân tạo trong Robot
Lĩnh vực nghiên cứu/Research Arears
- Thị giác máy và Thị giác robot
- Xử lý ảnh số, Xử lý ảnh 3 chiều
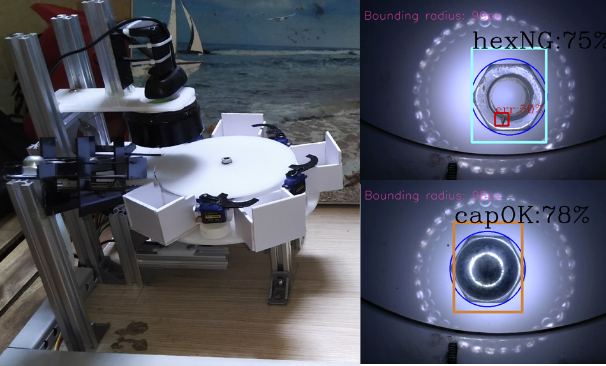
- Phân loại sản phẩm và kiểm tra ngoại quan sản phẩm tự động
- Robot 4 chân

Đào tạo/Educations
- 09/2010-12/2015: Tiến sỹ tại Đại Học Kỹ Thuật Quốc Gia Đài Bắc, Đài Loan
- 10/2007-12/2009: Thạc sỹ tại Trường Đại học Bách khoa Hà Nội
- 09/2002-07/2007: Kỹ sư tại Trường Đại học Bách khoa Hà Nội
Công trình tiêu biểu/Selected publications
Tạp chí:
Hội nghị:
|
HV cao học/ Master students
- Trịnh Tý Trung (2018-2020)
- Đỗ Đức Chiến (2018-2020)
- Trần Việt Thắng (2020-2022)
- Trần Văn Huy (2020-2022)
- Nguyễn Văn Uy (2020-2022)
NCS/ PhD students
- Nguyễn Hữu Long (2022-2026) – Đồng hướng dẫn
Sách/Books
- Nguyễn Trọng Doanh, Nguyễn Thành Hùng, Mạc Thị Thoa: “Thiết kế hệ thống cơ điện tử,” Nhà xuất bản Khoa học và Kỹ thuật, 2020.
Giải thưởng/Awards & Honour
- Giải nhì giải thưởng Bài thuyết trình hay nhất, Hội nghị quốc tế về các hệ thống thông minh và rô bốt tiên tiến 2015, Hiệp hội rô bốt Đài Loan.
- Đạt giải Nhất cuộc thi Sáng tạo Thiết bị Công nghệ Quốc tế, Tài trợ bởi Trung tâm Nghiên cứu Thiết bị Công nghệ, Đài Loan, 11-2014.
- Đạt giải Nhì trong cuộc thi AOI trong Chất bán dẫn và Quang điện tại Đại học Khoa học và Công nghệ Quốc gia Đài Loan, được Bộ Giáo dục Đài Loan tài trợ, 9-2014.
- Đạt giải Ba trong Cuộc thi Tự động hóa và Máy Công cụ Chính xác tại Đại học Quốc gia Chung Hsing, được tài trợ bởi Goodway Technologies, Đài Loan, 9-2013.
Dự án hiện tại /Projects
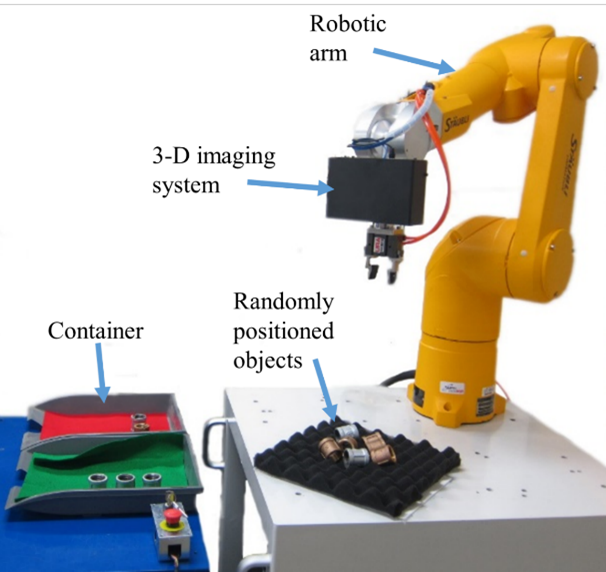
- Đề tài T2021-SAHEP-008: “Điều khiển cánh tay robot tự động gắp vật dựa trên công nghệ học sâu và xử lý ảnh 3 chiều,” Chủ nhiệm.
Hợp tác chuyển giao công nghệ (Lab, Đại học, Doanh nghiệp)/ Coperation and Tech. Transfer (Labs., Uni., Companies)