
 English
English
![[SME] NGHIÊN CỨU TIÊU BIỂU THÁNG 11 – SỐ 2](https://sme.hust.edu.vn/wp-content/uploads/2019/05/a.jpg)
Fixed-time Localization of Local Coordinate Frames: Interpretation and Applications to Formation Control Problems.
Doi: 10.1007/s12555-023-0113-4
Danh sách tác giả: Trần Văn Quốc
Tên tạp chí: International Journal of Control, Automation and Systems, IF: 3.2, CiteScore:5.7
Giới thiệu về nội dung nghiên cứu công bố:
Nghiên cứu đề xuất phương pháp định vị tư thế (hướng và vị trí gốc) các hệ tọa độ Descartes vuông góc gắn trên các tác tử (như UAV, robot tự hành, tàu thủy, …) của một hệ trong thời gian cố định (fixed-time). Phương pháp tính toán là phân tán chỉ dựa trên tư thế tương đối giữa các tác tử, biểu diễn bởi ma trận chuyển đổi thuần nhất SE(3) giữa hai hệ trục tọa độ. Dựa trên thuật toán định vị, các hệ trục tọa độ của các tác tử được xác định tương đối so với một hệ trục tọa độ chung một cách toàn cục và trong thời gian xác định.
Dựa trên xác định tư thế trong thời gian cố định, điều khiển tư thế đội hình đa tác tử có đồ thị kết nối có thể đơn giản hóa thành điều khiển tư thế cho mỗi tác tử. Khi đội hình mong muốn của hệ được xác định thông qua vector hướng giữa các tác tử, điều khiển đội hình với vector hướng trong thời gian xác định được trình bày mà không cần một hệ trục tọa độ toàn cục chung. Kết quả mô phỏng được đưa ra để minh họa cho thuật toán điều khiển đội hình đề xuất.
Hình ảnh tiêu biểu:
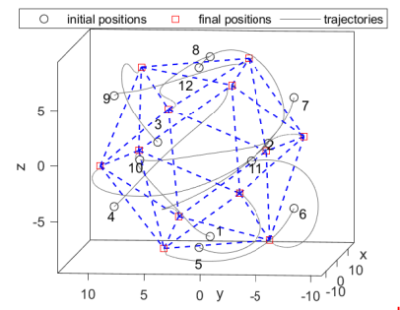
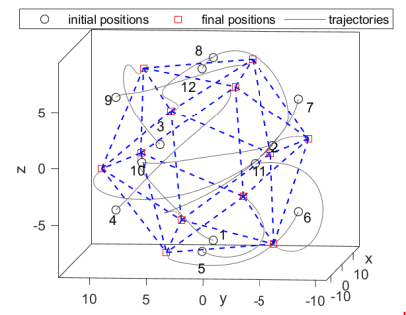
Hình 1: Đội hình là Nhị thập diện đều (icosahedron) gồm 12 tác tử.
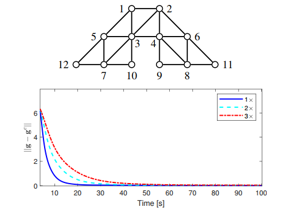
Hình 2: Đồ thị tương tác giữa các tác tử và sai số điều khiển hướng.