
 English
English

TS. Dương Văn Lạc
- Địa chỉ làm việc: Khoa Cơ điện tử, Đại học Bách Khoa Hà Nội, số 1- Đại Cồ Việt, Hà Nội
- Email: duongvan@hust.edu.vn; duonglacbk@gmail.com
- Website:
- Điện thoại: 0375.830.459
- Fax:
- Chức vụ: Giảng Viên
Giảng dạy/Teaching
- Nhập môn Cơ điện tử
- Kỹ thuật lập trình trong Cơ điện tử
- Đồ án thiết kế hệ thống Cơ điện tử
- Thiết kế hệ thống điều khiển
- Lập trình PLC và thiết kế giao diện người máy
- Robotics
- Rô bốt tự hành
- Rô bốt công nghiệp
- Hệ điều hành robot (ROS)
- Thị giác máy tính
- Xử lý ảnh
- Vi điều khiển và kỹ thuật lập trình nhúng
- Thiết kế vi mạch số với FPGAs
Lĩnh vực nghiên cứu/Research Arears
| ● Mô hình hóa, nhận dạng và điều khiển hệ thống
● Phát triển công nghệ cảm biến xúc giác ● Điều khiển tương tác cho rô bốt ● Phát triển hệ điều hành cho rô bốt |
Đào tạo/Educations
- 09/2009 – 06/2014 : Kỹ sư tại Trường Đại học Bách khoa Hà Nội
- 09/2014 – 10/2016 : Thạc sỹ tại Trường Đại học Bách khoa Hà Nội
- 10/2018 – 09/2021: Tiến sỹ tại Viện khoa học và công nghệ tiên tiến Nhật bản
Công trình tiêu biểu/Selected publications
| Tạp chí:
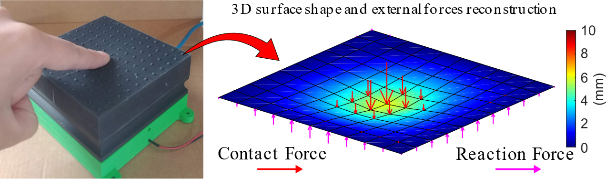
[1] L. Van Duong, V. A. Ho, Large-Scale Vision-Based Tactile Sensing for Robot Links: Design, Modeling, and Evaluation, IEEE Transactions on Robotics (T-RO), vol. 37, no. 2, pp. 390-403, April, 2021.
[2] Nguyen Van Khang, Lac Van Duong, Pham Thanh Chung, On two improved numerical algorithms for vibration analysis of systems involving fractional derivatives, Vietnam Journal of Mechanics, vol. 43, no. 2, pp. 171-182, June, 2021, ISSN 0866-7136, doi: https://doi.org/10.15625/0866-7136/15758
[3] Bien Xuan Duong, My Anh Chu, Lac Van Duong, Nghia Khanh Truong, Dynamic modeling and control in joint space of a single flexible link manipulator using particle swarm optimization algorithm, The University of Danang- Journal of Science and Technology, no. 6(115).2017, pp. 4-8, ISSN: 1859-1531. https://jst-ud.vn/jst-ud/article/view/2763
[4]. Bien Xuan Duong, My Anh Chu, Lac Van Duong, Dynamic behaviors of a single flexible link manipulator under different driving rules, The University of Danang- Journal of Science and Technology, no. 12(121).2017, pp. 6-10, ISSN: 1859-1531, https://jst-ud.vn/jst-ud/article/view/3239
[5]. Nguyễn Trọng Nghĩa, Dương Văn Lạc, Nguyễn Văn Khang, Lựa chọn mô hình thiết kế bộ giảm chấn động lực TMD để giảm dao động cho cầu treo dân sinh tại Việt Nam, Tạp trí giao thông vận tải, no. 8, pp. 69-72, 2015, ISSN: 2354-0818.
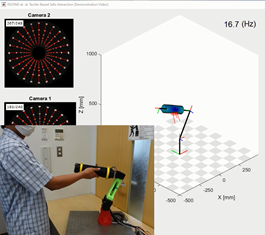
Hội nghị: [1] L. Van Duong, R. Asahina, J. Wang, V. A. Ho, Development of a Vision-Based Soft Tactile Muscularis, 2019 2nd IEEE International Conference on Soft Robotics (RoboSoft), April, 2019, pp. 343-348, doi: 10.1109/ROBOSOFT.2019.8722814 [2] Nguyen Van Khang, Shimizu, Fukunaga, Duong Van Lac, Bui Thi Thuy, Calculation of responses of a nonlinear fractional derivative model of impulse motion for viscoelastic materials using Runge-Kutta-Nyström method, Vietnam Conference of Mechanics, pp. 515-520, 2015. |
HV cao học/ Master students
NCS/ PhD students
Sách/Books
Giải thưởng/Awards & Honour
- Giải thưởng Honda Y-E-S Plus 2017
- Giải thưởng Honda dành cho kỹ sư và nhà khoa học trẻ Việt Nam năm 2014 (Honda Y-E-S 2014)
- Thủ khoa xuất sắc thành phố Hà Nội năm 2014
- Giải thưởng KOVA 2013
Dự án hiện tại /Projects
Hợp tác chuyển giao công nghệ (Lab, Đại học, Doanh nghiệp)/ Coperation and Tech. Transfer (Labs., Uni., Companies)